Marc Lata
MEGR 8172
12/12/2018
Take Home Final
The goal if this take-home final is to numerically solve the time evolution of a double pendulum system using a forward Euler method. The double pendulum has the following structure:
Figure 1: Double Pendulum
The governing equations of this system is given as:
![]()
![]()
a)
The first step to solve this system is to write this system
in the form
![]()
To do this I will introduce the angular velocity as a variable such that:
![]()
![]()
And my ![]() vectors will be:
vectors will be:
Now, in order to write the governing
equations in terms of these vectors, let me in substitute ![]() ,
and
,
and ![]() :
:
![]()
![]()
Now, I must solve these for ![]() ,
and
,
and ![]() .
To do this, I will utilize Matlab’s symbolic solving
functionality. I developed the following script to solve this system (solvesystem.m):
.
To do this, I will utilize Matlab’s symbolic solving
functionality. I developed the following script to solve this system (solvesystem.m):
%Solve
double pendulum system
syms m1 m2 l1 l2 g theta1 theta2 omega1 omega2 alpha1 alpha2
eqn1 =
(m1 + m2)*l1^2 * alpha1 +
m2*l1*l2*alpha2*cos(theta1-theta2) + m2*l1*l2*omega2^2*sin(theta1-theta2) +
g*l1*(m1+m2)*sin(theta1) == 0;
eqn2 =
l2*alpha2 + l1*alpha1*cos(theta1-theta2) - l1*omega1^2*sin(theta1-theta2) +
g*sin(theta2) == 0;
[x1,x2] = solve(eqn1,eqn2,alpha1,alpha2)
This gives me the following results:
x1 =
-(l1*m2*cos(theta1
- theta2)*sin(theta1 - theta2)*omega1^2 + l2*m2*sin(theta1 - theta2)*omega2^2 +
g*m1*sin(theta1) + g*m2*sin(theta1) - g*m2*cos(theta1 -
theta2)*sin(theta2))/(l1*(m1 + m2 - m2*cos(theta1 - theta2)^2))
x2 =
(l1*m1*omega1^2*sin(theta1 - theta2) -
g*m2*sin(theta2) - g*m1*sin(theta2) + l1*m2*omega1^2*sin(theta1 - theta2) +
g*m1*cos(theta1 - theta2)*sin(theta1) + g*m2*cos(theta1 - theta2)*sin(theta1) +
l2*m2*omega2^2*cos(theta1 - theta2)*sin(theta1 - theta2))/(l2*(m1 + m2 -
m2*cos(theta1 - theta2)^2))
Now I can tell Matlab how to take the
derivative of my ![]() vector (xdot.m):
vector (xdot.m):
%Derivative
of x vector
function q = xdot(x,m1,m2,l1,l2,g)
theta1 =
x(1);
theta2 =
x(2);
omega1 =
x(3);
omega2 =
x(4);
alpha1 =
-(l1*m2*cos(theta1 - theta2)*sin(theta1 -
theta2)*omega1^2 + l2*m2*sin(theta1 - theta2)*omega2^2 + g*m1*sin(theta1) +
g*m2*sin(theta1) - g*m2*cos(theta1 - theta2)*sin(theta2))/(l1*(m1 + m2 -
m2*cos(theta1 - theta2)^2));
alpha2 =
(l1*m1*omega1^2*sin(theta1 - theta2) - g*m2*sin(theta2) - g*m1*sin(theta2) +
l1*m2*omega1^2*sin(theta1 - theta2) + g*m1*cos(theta1 - theta2)*sin(theta1) +
g*m2*cos(theta1 - theta2)*sin(theta1) + l2*m2*omega2^2*cos(theta1 -
theta2)*sin(theta1 - theta2))/(l2*(m1 + m2 - m2*cos(theta1 - theta2)^2));
q =
[omega1;omega2;alpha1;alpha2];
The Forward Euler method can be written as:
![]()
This can be programmed very easily as (forwardeuler.m):
%Forward
Euler Function(
function q = forwardeuler(x,dt,m1,m2,l1,l2,g)
xd = xdot(x,m1,m2,l1,l2,g);
q = x +
xd*dt;
Now, I can implement this forward Euler method for the initial
conditions provided(driver.m):
%Initial
Conditions
x(:,1)= [.8*a;
1.1*a; 0; 0];
for i = 2:nt+1
x(:,i) = forwardeuler(x(:,i-1),dt,m1,m2,l1,l2,g);
[K(i),V(i)] = energy(x(:,i), m1, m2, l1, l2, g);
E(i) = K(i) + V(i);
end
I have also implemented in this step the energy calculation (energy.m):
%Energy
Calculation
function [K,V] = energy(x, m1, m2, l1, l2, g)
th1 = x(1);
th2 = x(2);
w1 = x(3);
w2 = x(4);
K = (1/2)*m1*l1^2*w1^2 + (1/2)*m2*l1^2*w1^2 + (1/2)*m2*l2^2*w2^2 +
m2*w1*l1*w2*l2*cos(th1-th2);
V =
-(m1+m2)*g*l1*cos(th1) - m2*l2*g*cos(th2);
For the following physical parameters and time step (main.m);
%System
Parameters
a = strlength("Lata")/5; %Name
Dependent Parameter
m1 = 2; %Kg
m2 =
1.5; %Kg
l1 =
1.1 * a; %Meters
l2 =
1.8 * a; %Meters
g =
9.81; %m/s^2
T = 25; %Seconds
dt =
1e-2; %Seconds
I get the following results:
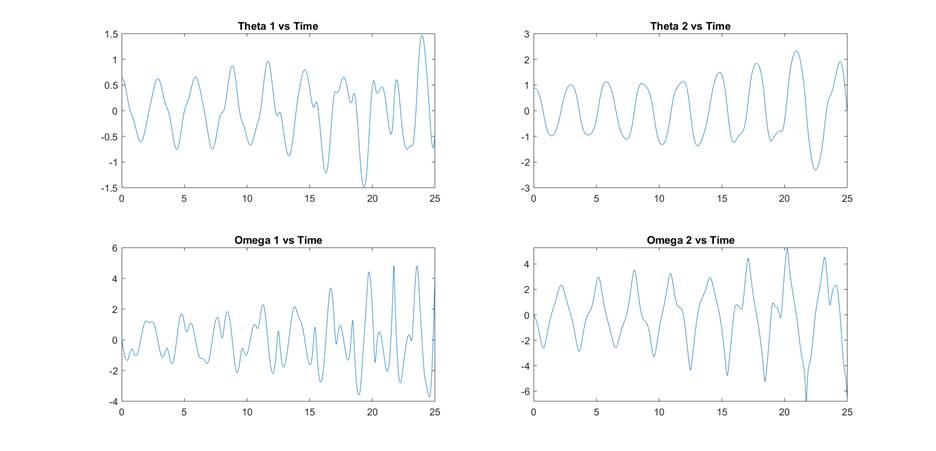
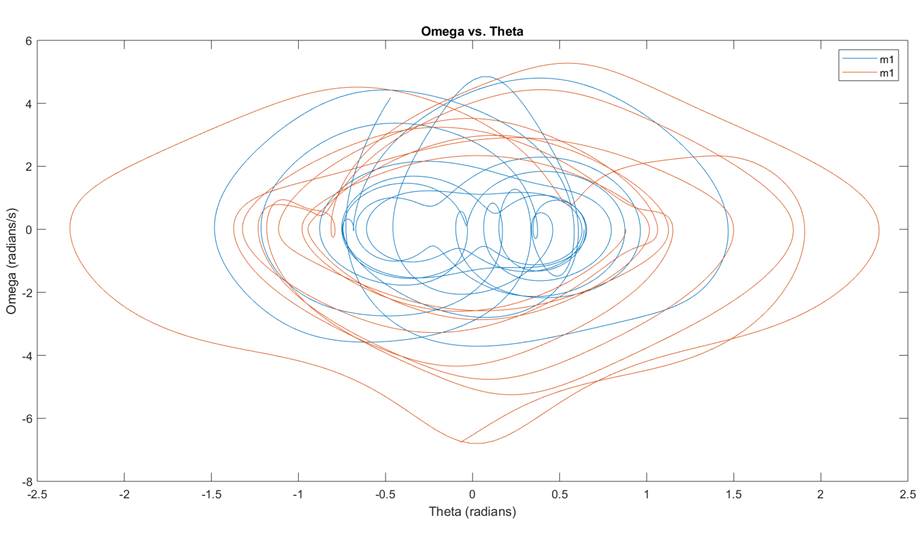
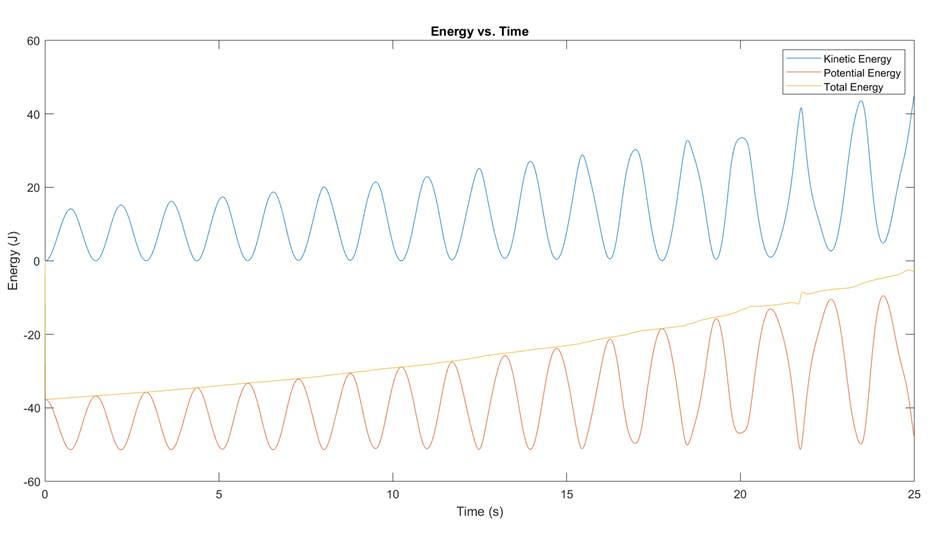
Figure 2:
Double Pendulum Simulation with dt =.01
You can see that the energy in my system is constantly increasing,
and there is no regularity to the oscillations. If I decrease my time step to
1e-5, I can get results that appear to be more representative of the real physical
system:

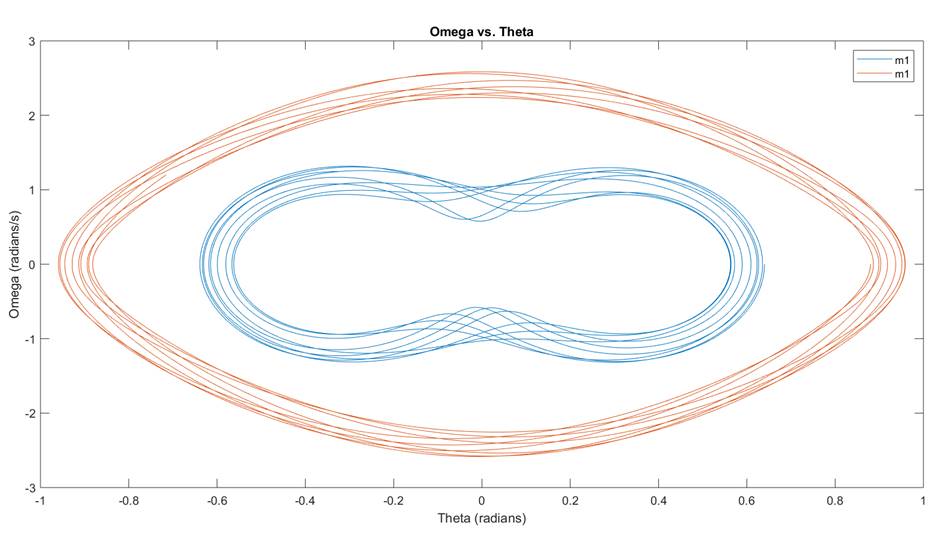
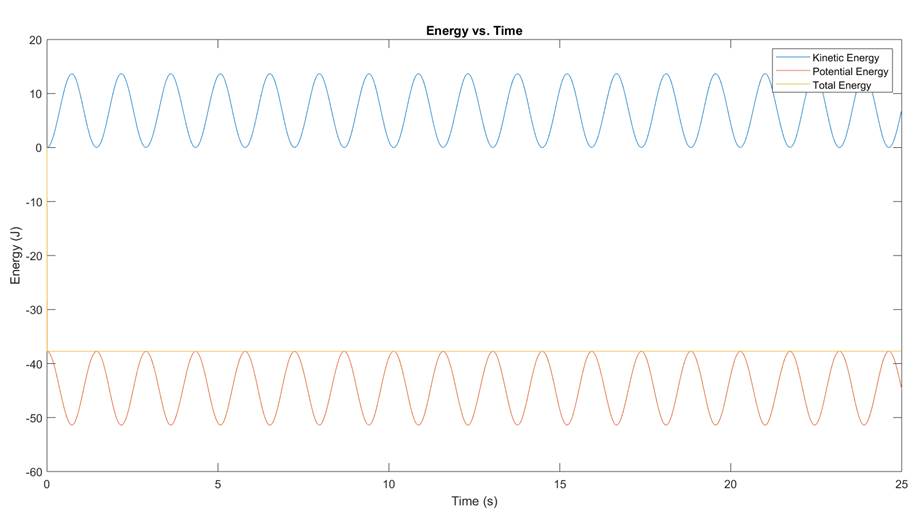
Figure 3:
Double Pendulum Simulation with dt = 1e-5
In this simulation, my energy remains constant, and the pendulums
appear to be in some fixed oscillatory path.